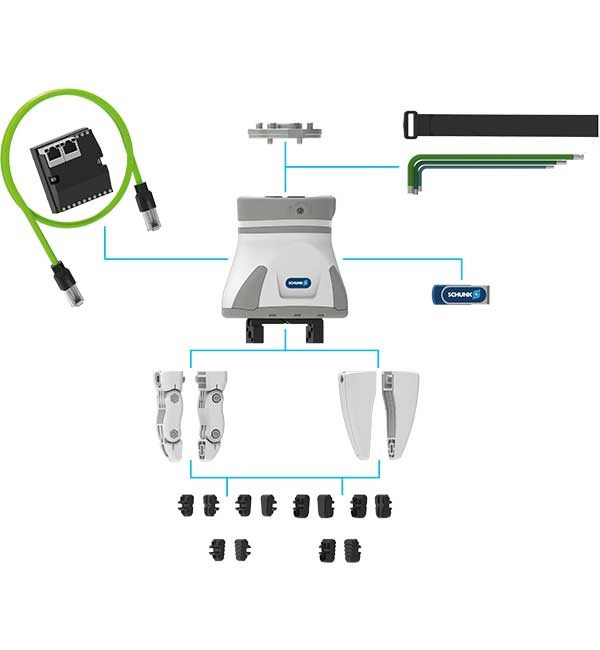
Co-Act Gripper EGH
SCHUNK
Le préhenseur flexible et facilement réglable pour les cobots
CARACTÉRISTIQUES
- Course longue et librement programmable
- Mouvement de préhension avec cinématique parallèle pour une force de préhension constante sur toute la course
- Affichage d’état intégré
- Doigts flexibles pour une fixation directe
- Plug & Work pour les robots universels
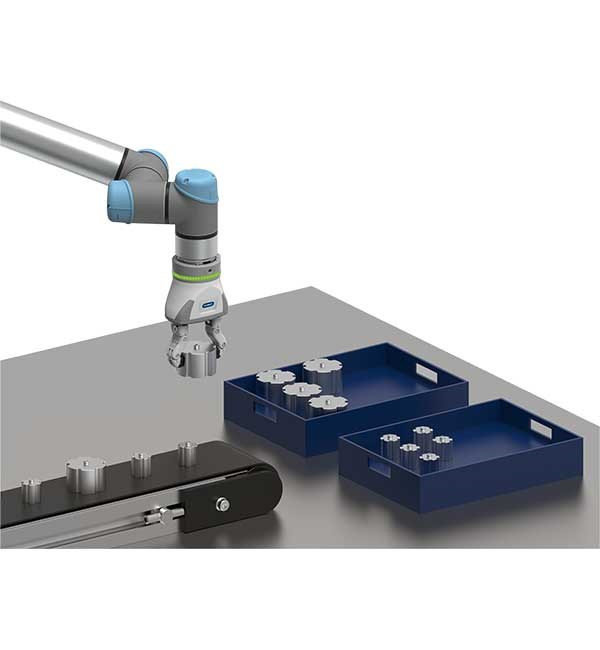
COMMENT ÇA MARCHE ?
La transmission à engrenages à plusieurs étages est entraînée par un servomoteur sans balais. Les mâchoires de base de la pince sont entraînées par trois pignons de sortie parallèles, qui ont des crémaillères intégrées à cet effet. Les mors sont donc entraînés par le principe pignon et crémaillère, qui transforme le mouvement de rotation du servomoteur et du réducteur en un mouvement linéaire des mors de base.


{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}